
A custom made 3D rigid body physics engine built on top of a custom made archetype ECS engine, rendered using my DirectX 11 framework.
2 months
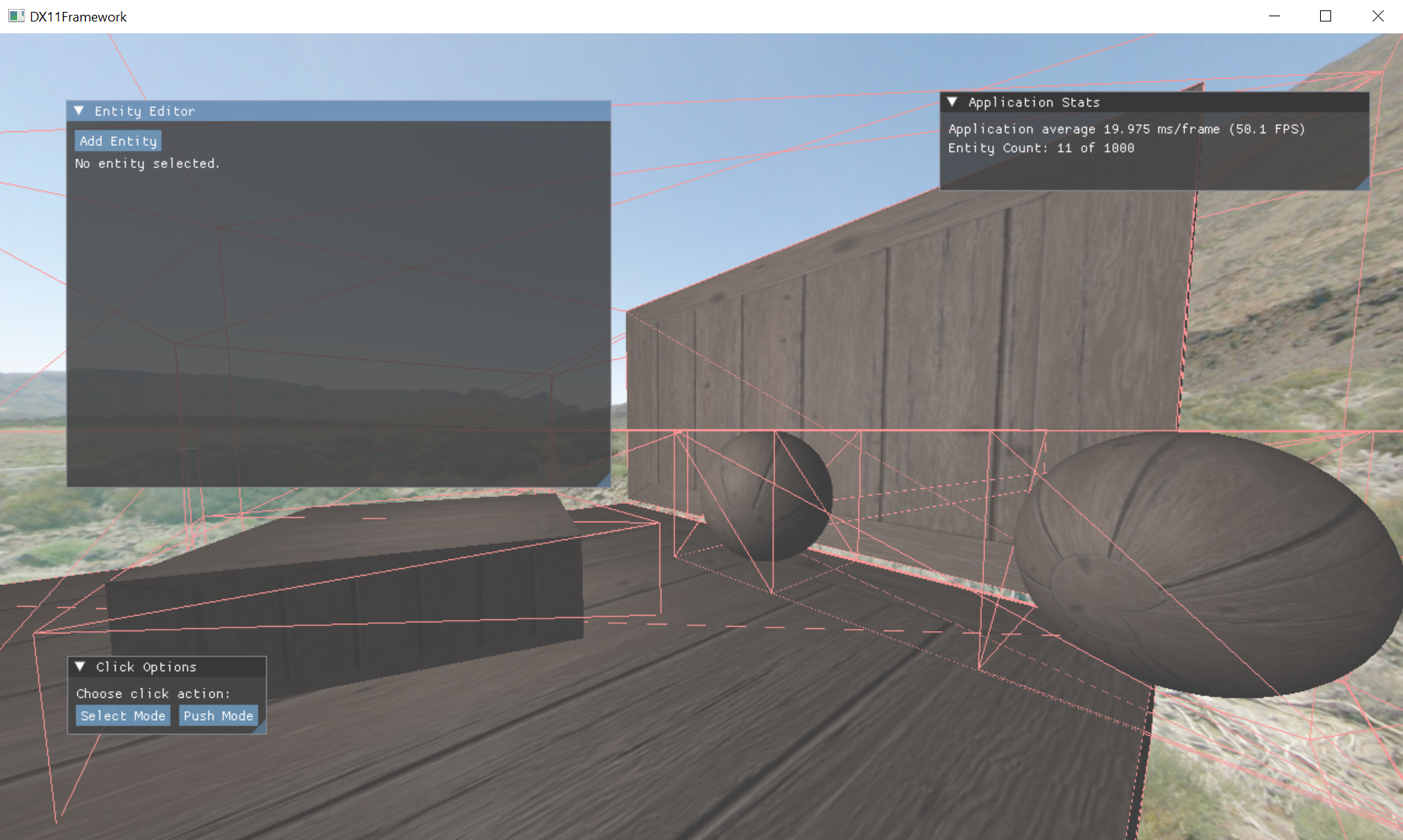
Collision can be done with points, triangles, spheres, AABBs and OBBs.
By utilising an iterative process in the collision resolution, the process becomes generally more stable.
You can view the calculated contact points for every collision, or the spatial partitioning AABBs for every object.
A static collision object can be generated from a height map that allows objects to roll around on terrain.
Below is the UML class diagram representing both the physics framework and the ecs engine.